1. PID is a closed-loop control algorithm, which means it relies on continuous feedback to adjust the system and achieve the desired output. In order to implement PID, you must have a feedback mechanism in place. For example, if you're controlling the speed of a motor, you need a sensor that measures the actual speed and sends that data back to the controller. This allows the system to compare the current state with the target and make necessary adjustments. The following explanation will use speed control as an example.
2. PID stands for Proportional, Integral, and Derivative control. However, not all three components are always required—some systems may use only P, or a combination like PI or PD. My first simple idea for closed-loop control was using just the proportional term, where the current error is subtracted from the target value. If the result is positive, the system slows down; if negative, it speeds up. This is the most basic form of closed-loop control, but more advanced techniques often combine multiple elements for better performance.
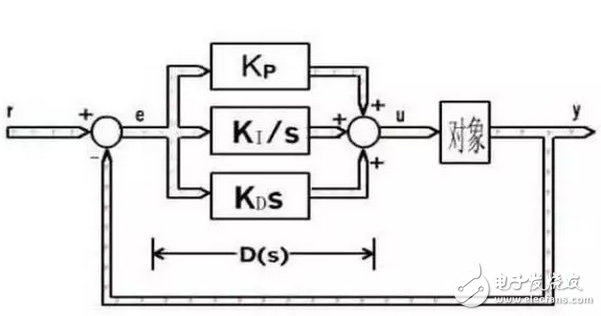
3. Each component of PID has a specific role in the control process:
- The Proportional (P) term reacts to the current error. A higher gain can speed up the response and reduce error, but too much can cause instability.
- The Integral (I) term accumulates past errors over time, helping eliminate steady-state error and improve accuracy. It ensures that the system eventually reaches the target, even if it takes longer.
- The Derivative (D) term predicts future errors based on the rate of change of the current error. It helps anticipate changes and improve dynamic response, but it can also amplify noise, making it less suitable for noisy environments.
Each part works best when combined with others, and careful tuning is essential for optimal performance.
4. Selecting the right PID parameters depends on the system's characteristics. Different control laws are suited for different applications:
(1) Proportional (P) control is fast but cannot eliminate steady-state error. It’s good for systems with minimal lag and small load variations, such as water level control in some facilities.
(2) Proportional-Integral (PI) control adds integral action to eliminate residual error. It’s widely used in industrial settings where precision is important, such as flow and temperature control systems.
(3) Proportional-Derivative (PD) control improves dynamic performance by predicting changes. It’s useful in systems with large time constants or capacity lags, but not effective for pure time delays or noisy signals.
(4) Proportional-Integral-Derivative (PID) combines all three actions for the best overall performance. It’s ideal for complex systems with high control requirements, such as temperature and composition control.
Understanding time delay is crucial when using PID. There are two types: capacity lag (due to measurement or transmission delays) and pure lag (common in material transfer systems). These factors influence how well the derivative term performs.
In short, choosing the right control law requires considering both the process characteristics and the control goals. PID is powerful, but not always the best choice. It’s important to consider other strategies like cascade or feedforward control when needed.
5. Formula
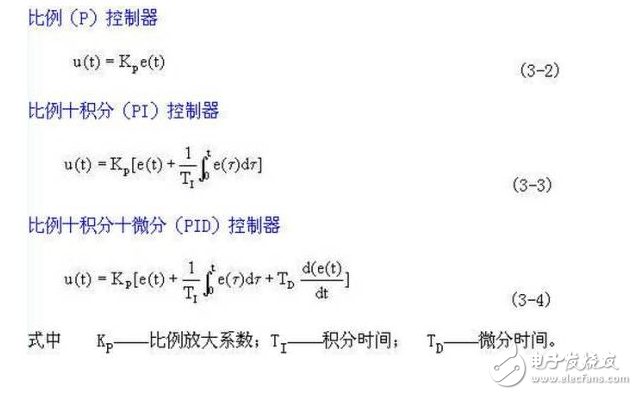
Calculating the PID value involves combining the proportional, integral, and derivative terms according to their respective formulas.
6. Question
Tuning the three parameters—Kp, Ti, and Td—is one of the most critical aspects of PID control. During programming, only approximate values can be set, and the optimal settings are usually determined through trial and error while the system is running. Therefore, the debugging phase must allow for real-time adjustment and storage of these parameters.
7. Self-tuning of Parameters
In some applications, especially in general instrumentation, the system's behavior may be uncertain. Different objects require different parameter values. To simplify this, many systems use self-tuning features. When first used, the system performs a few measurements to determine the best parameters and stores them for future use. This makes it easier for users who may not have technical expertise in control theory.
Three Phase Online UPS,Tower Online UPS,Rack Mount Online UPS,Isolation Transformer
Shenzhen Unitronic Power System Co., Ltd , https://www.unitronicpower.com