This paper introduces an imaging sensor architecture that relies on a memristor to perform a pixel-level adaptive background extraction algorithm. The pixels of the built-in optical frequency converter (L2F) are the core components of image processing. When the digital pulse whose output is proportional to the light intensity is applied to the memristor, the memristor resistance will change accordingly. The other two memristors are used to preserve the dynamic boundary, and the behavior of the photo-generated signal outside the boundary is considered to be an abnormality, that is, an unexpected rapid change. Compared to full CMOS imaging sensors, memristor-based solutions enable smaller pixel pitch and non-volatile storage, allowing designers to create image background models using programmable time constants.
This article refers to the address: http://
1 Introduction
In the past few decades, the industry has carried out extensive research and discussion on the theory of CMOS architecture vision sensors, aiming to process images in the early stages of imaging, extracting the most important features from the scene, and if other means achieve the same purpose, for example Using ordinary computing techniques, expensive costs are required [1], [2], [3], [4], [5], [6]. In this respect, motion detection is one of the most important image features and the basis for multiple complex visual tasks. This article focuses on the concept of time contrast, a concept that is particularly important in many applications, including traffic monitoring, human motion photography, and video surveillance [2], [4], [5], [7]. These applications require accurate and reliable image detection, accurate shape detection, and timely response changes. In addition, motion detection must be flexible to adapt to different work scenarios and light intensity conditions. Background extraction is currently the most recognized method of motion detection. Background extraction is to generate a background estimate and then update it frame by frame. Analyze the type of motion and associate it with a specific object in the scene for a higher level of processing. In the process, the change in light intensity is undoubtedly the first clue to help us discover the movement. Because it is possible to accidentally detect all pixel changes at a certain point in time, including changes caused by light, shadows, and noise, potential changes that should be considered when the pixel changes too fast relative to the past. Therefore, a low-pass memory should be implemented at the pixel level to track pixel contrast changes and alert when pixel behavior changes.
This article describes how to implement the above algorithm using a memristor. In the 1970s, Professor Cai Shaozhen theoretically predicted the existence of a passive device called a memristor. In 2008, HP Lab demonstrated the physical model of this passive device. In the name of the memristor, the memristor is a kind. A variable resistor whose on-state can memorize the current history of the previous flow through the memristor.
The main contents of this paper are as follows: The next chapter introduces the memristor behavior related to input bias, especially pulse-based programming, which is the basis of this paper. The third chapter introduces the working principle of pixels, and the fourth chapter focuses on pixel implementation. The fifth chapter introduces the simulation results, and the sixth chapter is the conclusion.
II. Memristor behavior
As mentioned earlier, the memristor can be viewed as a time-variable resistor, the value of which depends on the current value previously flowing through the memristor.
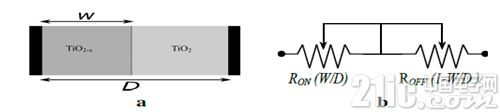
Figure 1: Memristor and simplified equivalent circuit diagram. Figure a: TiO2 memristor structure; Figure b: equivalent resistor circuit
The first proposed memristor concept is Professor Cai Shaozhen, who believes that the memristor is the fourth basic passive component other than resistors, capacitors, and inductors when reasoning the symmetry basis of the passive circuit theory. 8]. After discovering the physical model of the memristor, many people want to develop analog integrated circuits using the exciting memory characteristics of the memristor. The first physical model developed by HP Labs is based on two regions of Ti O 2 [9]: a high-resistance undoped region and a doped region with high-conductivity oxygen-pore TiO 2-x . Sandwiched between the two metal electrode plates as shown in Figure 1a. When an external bias is applied to the memristor, the boundary between the doped layer and the undoped layer moves, and the displacement is a function of the applied current or voltage, and thus the drift of the charged doped region results in two Resistance change between electrodes [10]. For simple resistance conduction, the following equation defines the voltage-current relationship:
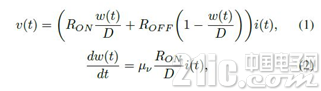
Wherein R ON is the resistance of the highly conductive region of the semiconductor film having a high doping concentration; R OFF is the resistance of the high resistance undoped region; D is the length of the memristor; and the state variable w(t) is the doping ratio , u is the doping mobility. Equation (2) integral operation yields the formula w(t):

Substituting (3) into (1), the memristor value is obtained.
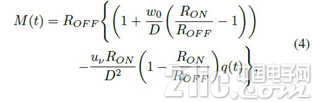
If R ON ≤ R OFF , the memristor value can be expressed by the following equation:

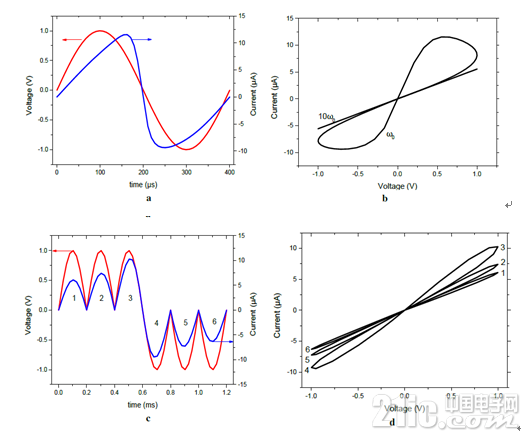
Use the reference [9] to obtain the parameters related to the above equation, and develop a memristor behavior model using Verilog-A language. Through circuit simulation, the model is verified by the following parameters: R ON = 200Ω, R OFF =200KΩ, u 2 = 10 -10 cm 2 S -1 V - 1 , D = 10 nm. As long as the system is within the M Є (R ON , R OFF ) boundary, the memristor exhibits a symmetrical behavior. When any boundary is reached, the memristor will act like a linear resistor, keeping the boundary resistance until the input polarity is reversed [9], [11]. Figure 2 shows a typical memristive characteristic curve. These interesting behaviors of the memristor together constitute the basic characteristics of the memristor or various memristive devices [12]. Figure 2a shows the applied voltage and the corresponding current versus time t. . Figure 2b shows the current-voltage characteristic curve. It is not difficult to see from the figure that when w ≤ w0, hysteresis occurs, and when w ≫ w0, the lag is shortened. Figure 2c shows the behavior of the memristor under unbalanced input signal conditions. We observed that during the first three cycles, the w(t) value gradually increased, which is the result of the accumulation of net charge over a certain period of time. After three consecutive cycles of opposite polarity signals are applied, w(t) is reduced to the initial state. In summary, as shown in Figures 2a and 2b, any symmetrical AC bias can cause double-loop current-voltage hysteresis, dropping to a straight line at high frequencies. Furthermore, for any asymmetry in the presence of a bias voltage, as shown in Figures 2c and 2d, we observe a multi-ring current voltage hysteresis, and as the current increases, the multi-ring current voltage hysteresis becomes more pronounced.
A high-quality manufacturer of railway Scales and accessories in China. Track scale, a weighing instrument used to weigh the weight of railway freight cars. It is suitable for railway scale, light rail weighing and various special scales. It is widely used in factories, mines, metallurgy, foreign trade and railway departments to weigh trucks in bulk.
Digital weighing sensor, Vehicle weighing sensor, Weighing sensor track scale, Digital weighing sensor.
Digital weighing sensor, Vehicle weighing sensor, Weighing sensor track scale, Digital weighing sensor
Ningbo Santwell Imp & Exp Co.,Ltd , https://www.santwell.com