WaveSense announced the launch of a new technology that uses ground-penetrating radar (GPR) data to do "SLAM high-precision map positioning" underground to ensure that autonomous vehicles remain accurately in the lane to improve automatic vehicle navigation.

A new startup company called WaveSense Inc. announced the launch of a new technology that significantly improves autonomous vehicle navigation by using ground penetrating radar (GPR) data to accurately keep autonomous vehicles in the lane.
WaveSense's technology works by sending electromagnetic pulses to the ground and using reflections from underground features to generate a base map. Ground penetration radar measures the reflection of objects and changes in soil properties deep underground, including pipes, roots, rocks and soil. Every inch of road has a unique underground composition, which allows WaveSense to build a highly accurate map.
The technology is not specifically designed for autonomous vehicles, but another layer of sensor data and redundancy used in conjunction with the vehicle's lidar, camera, surface radar, and GPS data to aid in the navigation of autonomous vehicles.
This technology is suitable for severe weather conditions. This includes snow, rain, and fog, and places where lane markings are not present or where camera-based sensors are not visible.
What is GPR?

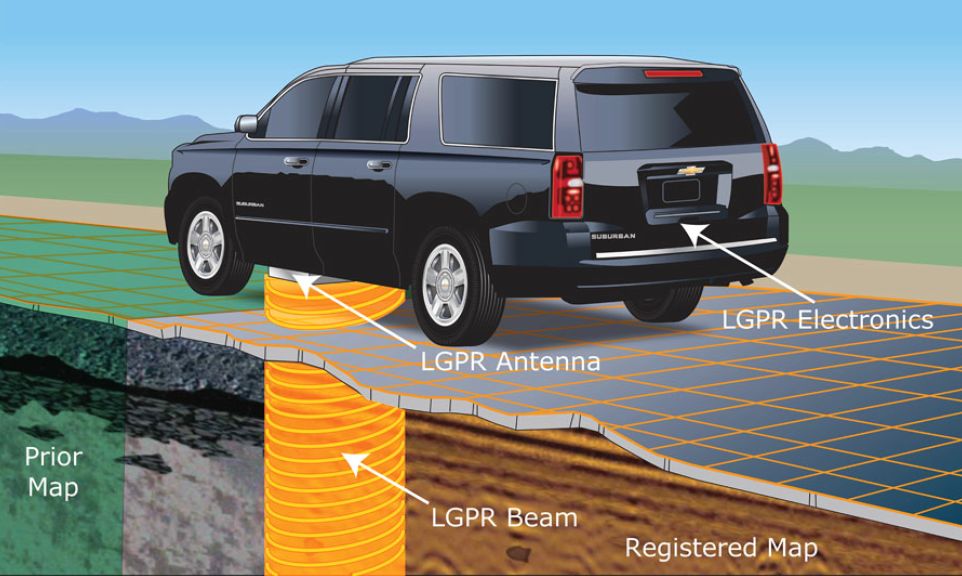
Ground Penetrating Radar (GPR) is a geophysical method that uses radar pulses to image the underground. It uses the high frequency (VHF) radar reflections of underground features to generate baseline maps, and then matches the current GPR reflections with these maps to Determine the position and position of the vehicle with centimeter-level accuracy. MIT Lincoln Laboratory has demonstrated a new method of vehicle location using previous map-based images from ground penetrating radars [1]. Known as "Positioning Ground Penetrating Radar" (LGPR), it has proven centimeter-level accuracy at speeds of up to 60 mph [2]. The centimeter-level positioning of highway speed during the night blizzard in 2016 was proven. [3]
How does it work?
For underground sensing, GPR is one of the most versatile and diverse sensing modes today.

Radar: The ground penetrating radar system works by emitting pulses of electromagnetic radiation to the ground and measuring the reflection of scattering points below the ground surface. Reflection occurs at the interface between objects with different electromagnetic properties, such as pipes, roots and rocks in the surrounding "dirt". Changes in soil layers and moisture content cause reflections in the data. However, it is not these discrete objects that usually dominate the GPR reflection profile, but the natural inhomogeneities in the underground geology. Changes in soil layers and moisture content will affect the reflections in the data. Therefore, GPR paints a complete picture of the underground environment. With few exceptions, almost every discrete object and soil feature can be received, as long as its wavelength is not very small and has sufficient contrast with the surrounding soil. The premise of GPR positioning is that these underground features are sufficiently unique and static to allow them to be used as an identifier for the precise location of their reflections.
Mapping: The first step in the GPR process is to develop a map of the environment under the road. In this first step, GPR data and GPS tags of underground "objects" are simply collected to form an initial database of underground features. This underground map is then used as a reference data set to estimate the location of the vehicle in subsequent visits.
Tracking: Next, perform online localization in several steps. When the vehicle is moving, periodically extract data from the database for matching. Always maintain a local grid of baseline data. Around the initial position, the search area is estimated, which contains "particles" (points on the grid) that represent candidate positions and directions. The algorithm iteratively evaluates the particles to narrow the search for the maximum correlation in the vehicle's five-dimensional space (east, north, altitude, roll, and heading). After several iterations, the most relevant particle is selected as the most probable estimate of the current position and direction of the vehicle. Update the search area and expand or shrink to reflect the new estimate.
WaveSense

WaveSense was established in 2017 and was funded by Rhapsody Venture Partners, a venture capital fund located in Cambridge, Massachusetts, focusing on science and technology investments.
Current systems used by autonomous vehicles mainly rely on ground-based sensors such as GPS, lidar, and cameras to identify the exact location of the vehicle. However, these technologies do not work well in low light or weather conditions, or when road markings are not clear.
WaveSense uses data from unique geological patterns 10 feet below the ground to build a fingerprint roadmap. Unlike the constantly changing visual landscape on the ground, this underground data is static and provides a guide that is always available for autonomous vehicles under any weather conditions. Since the underground map is very stable compared to the surface map, there is no need to scan and update the underground map frequently.
When the vehicle is driving along the road, WaveSense scans the underground soil, rocks, and road surface approximately 126 times per second, and compares the scan results with its on-board image database to determine the exact location of the vehicle relative to the road.
By adding underground data to above-ground sensor information, self-driving cars will have the comprehensive ability to always know their exact location. According to WaveSense, this navigation mode is accurate to a few centimeters at standard highway speeds.
Tarik Bolat, CEO of WaveSense, said: "With the development of automated systems, global traffic and mobility are undergoing tremendous changes." "But before the widespread adoption of autonomous vehicles, navigation safety and reliability must be greatly improved. WaveSense’s technology has fundamentally improved the safety of autonomous vehicles under all conditions and enhanced public trust.â€
The technology was originally developed for military applications at MIT Lincoln Laboratory. The first batch of systems were deployed in Afghanistan in 2013 and solved the situation where road markings did not exist or were blocked due to low visibility.
Laptop power adapter charger for Asus:
Laptop Model
Power Adapter
K42F K42JB K42JK K42JR K42JV K52f A52f A42 X52f A52 A52f A52J
19v 3.42a, 5525
K60IJ K50IJ K50I K60I
19v 4.74a, 5525
Our service:
Stable output and high charging efficiency.
Elegant outlook design as original one, touch smoothly and comfortable.
Original charger is good, but as a replacement, our product has more reasonable price when your original charger is broken.
And, the market of the replacement adapters becomes bigger and bigger. People would rather buy a copy one then the original because of the price.
But at the same time, people worry about that they will buy something defective. So the problem comes, how to buy a good quality one with a good price?
As a professional power adapter manufacturer, we have excellent R&D team, skilled staffs and responsible after-sale service. All your benefits can be under protected after you buy products for our company.
Our certificates :ISO9001:2008 & ISO14001:2004 , CCC , CE , FCC , ROHS.
All our products has 1 year warranty. In other words, if you get the dad products which are not damaged physically from us in one year, we will replace you the new one or the whole bulk order.
Asus Adapter,Adapter For Asus,Laptop Adapter For Asus ,Power Supply For Asus
Shenzhen Waweis Technology Co., Ltd. , https://www.laptopsasdapter.com