The fuzzy control algorithm refers to an algorithm for controlling the voltage and frequency of the frequency converter, so that the motor's speed-up time is controlled so as to avoid the effect of too fast speed increase on the service life of the motor and the too slow speed increase affecting the work efficiency. The key to fuzzy control lies in the division of domain, membership, and fuzzy level. This control method is especially applicable to multiple input and single output control systems.
Fuzzy Logic Control (Fuzzy Logic Control) is a computer digital control technology based on fuzzy set theory, fuzzy linguistic variables and fuzzy logic reasoning. In 1965, LAZadeh of the United States established fuzzy set theory; in 1973 he gave definitions of fuzzy logic control and related theorems. In 1974, the British EHMamdani formed a fuzzy controller based on fuzzy control statements for the first time, and applied it to the control of boilers and steam engines, obtaining the success of the laboratory. This pioneering work marks the birth of fuzzy cybernetics. Fuzzy control is essentially a kind of nonlinear control and belongs to the category of intelligent control. One of the characteristics of fuzzy control is that there are both systematic theory and a large number of practical applications. The development of fuzzy control initially encountered greater resistance in the West; however, in the East, especially Japan, it has been rapidly and widely used.
Fuzzy control works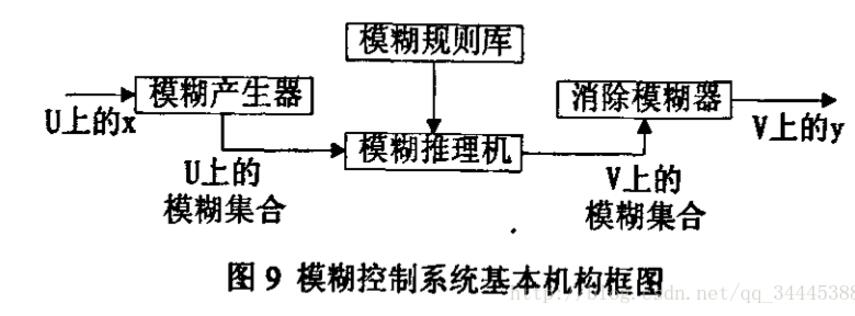
From the composition of the fuzzy controller, we know that input fuzzification, fuzzy inference, and defuzzification are the three main steps in implementing fuzzy control. Sometimes based on the role of these three links are called: fuzzer, fuzzy inference engine and defuzzifier. So to learn to use fuzzy control, the main thing is to understand the implementation of these three parts.
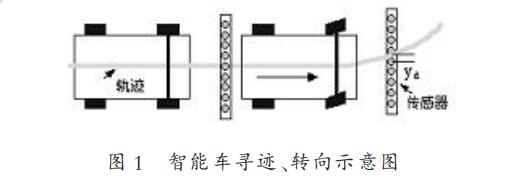
Intelligent vehicle steering servo control based on fuzzy control algorithm and intelligent vehicle tracking error model establishmentThe guidance control of the smart car utilizes a photoelectric sensor to recognize the path, and then controls the running direction of the vehicle according to the relative positional deviation between the vehicle and the route marking to ensure that the vehicle runs along the route marking. We chose the photoelectric sensor tracking scheme as the input for control. As shown in Figure 1, the front row of the car is a photoelectric sensor, where r is the sensor distance between the two, and yn is the distance between the middle photo sensor and the detected path sensor, which is positive at the top of the track and negative at the bottom. , then: yn=(m-5)×r(1)
Where: m is the position of the sensor that detected the trajectory.
After analyzing the system, it can be seen that due to the complexity of the mechanical part of the car and the circuit part, it is difficult for the system to establish an accurate mathematical model. Therefore, we consider the use of fuzzy control here to theoretically establish a fuzzy control process to improve the overall control system. The fuzzy control process is shown in Figure 2.
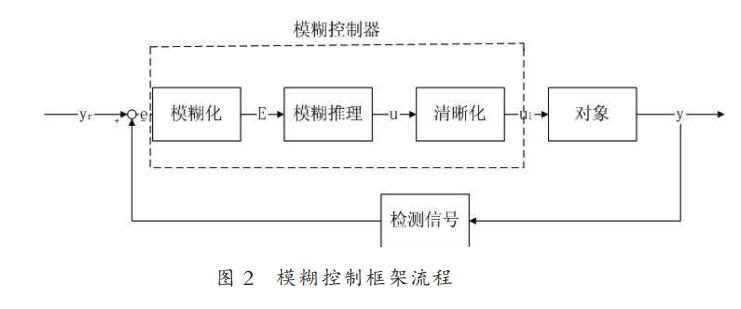
Yr: System output, ie the steering direction of the steering gear of the car.
Y: System setting input, that is, the center position of the trolley on the tracing line in the positive direction.
In the figure, the fuzzy controller is implemented by the SCM programming module, and the feedback signal is collected by the infrared sensor module. The control object is the deflection direction and angle of the steering gear of the car.
The design of the fuzzy controller is as follows:
1) Fuzzing trolley deviation
Let the left direction of the cart be negative and the right direction be the positive direction. The deviation range e (theoretic domain, in cm) is [-7.5, 7.5], and discriminate the universe into the integer set E=[-6 , -5, ..., 5, 6], then the quantization factor k = n/x = 12/15 = 0.8.
Then make the following settings:
"Large negative" (NB): [-6, -4], left-sided large.
"negative medium" (NM): [-6, -2], left larger.
"Negative small" (NS): [-4, 0], left side bias is small.
Zero (ZE): [-2,2], centered.
"Positive" (PS): [0,4], right side is smaller.
"Center" (PM): [2,6], the right side is larger.
"Zhengda" (PB): [4,6], right-deviationed.
Set the membership function as a trigonometric distribution, as shown in Figure 3.
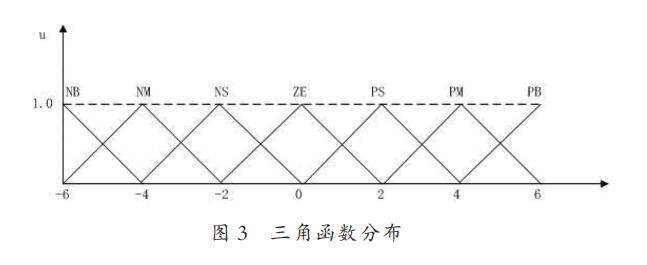
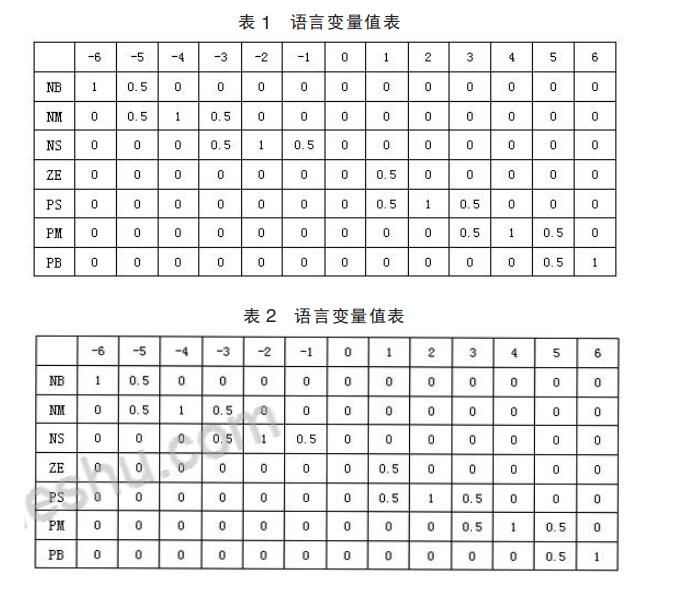
Table 1 shows the language variable value table of the deviation position.
2) Fuzzification control amount u (deflection direction and angle)
The domain of u is [-36,36], which is discretized into an integer set N=[-6,-5,...,5,6]. Take PB, PM, PS, ZE, NS, NM, NB seven language variable value grades, and the deviation position is similar to Table 1 below.
3) Control rules
The control rules are shown in Table 3.

4) Fuzzy Reasoning
The CRI reasoning look-up table method is adopted, that is, the control quantity (deflection angle U) is obtained by directly comparing the input quantity (deviation E) with the control rule.
5) The clarity of blur
Using the center of gravity method, the elements of the fuzzified output (fuzzy set) are multiplied by their corresponding domain values ​​and averaged. Formulated as follows:
3, steering gear steering control strategy and algorithmBased on the previous fuzzy control model, the design of the program algorithm includes: quantifying the signal detected by the sensor (facilitating fuzzification processing), and corresponding to the steering angle calculation of the steering gear. In addition, in order to avoid the overshoot from entering straight corners, and from the curve into the straight swing, the program also needs to control the speed.
1) Quantification process
For convenience of processing, we quantized the signal obtained by the sensor to [1,2,3,...,22,23,24]. The specific quantization process is as follows:
a. Place the sensor (sensor layout see sensor module) numbered 1,2,...,11,12 from right to left.
b. Due to the dense sensor distribution, several (usually one to two) sensors may detect black lines at the same time. The sum of the maximum and minimum values ​​is taken as the detected parameter (if only one sensor detects To the black line, then the maximum and minimum values ​​are the same).
2) Calculation of steering angle of steering gear
For this fuzzy control problem, the entire reasoning process is relatively simple, there is no need to design a special program to calculate, we get the final servo steering angle through calculation, the specific calculation inference process is as follows:
a. As mentioned earlier, the corresponding deviations from the design position of the sensor projected on the datum line are -7.5, -6.7, ..., 6.7, 7.5 from left to right. Where -7.5, -5, -2.5, 0, 2.5, 5, 7.5 correspond to -6, -4, -2, 0, 2, 4, 6 of the integer set E, similar to 24 after the above quantization process, 20,16,13,10,6,2 correspond. In this case, the above quantified result can be represented in Zadeh notation to represent its fuzzy set on the universe E. For example, the position of 19 can be expressed as 
b. It is known by the control rules that the output results of -6, -4, -2, 0, 2, 4, and 6 in N (deflection angle blurring E) are sequentially -6, -4, -2, 0, 2,4,6. After fuzzy reasoning, the output quantity (fuzzy quantity) of each quantified result can be obtained, which can be represented in the universe of U by Zadeh's notation. For example, the corresponding output of 19 (fuzzy quantity) can be expressed as 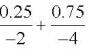
c. The output result corresponding to each quantified result is obtained by clearing by the center of gravity method. For example, the output result of −2 corresponds to 7 degrees, and the result of −4 corresponds to approximately 21 degrees. The output result (clear quantity) corresponding to 19 is 0.25×7+21×0.75=17.5.
d. In addition, in order to make the sensor run smoothly on the straight track, the output values ​​of the quantized values ​​10 to 16 are adjusted appropriately so that the corresponding outputs of 12, 13 and 14 in the middle are 0 degrees, and the other corresponding adjustments make the angle The changes are more average.
3) Speed ​​control
Since the car is used at a constant speed, when the car enters a bend from a straight road, overshoot may occur, and there may be oscillations when entering the straight road from a bend. Therefore, the speed must be adjusted. The specific approach is to decelerate immediately when the sensor is detected to be out of focus, and then return to its original speed when it returns from the bias to the center position.
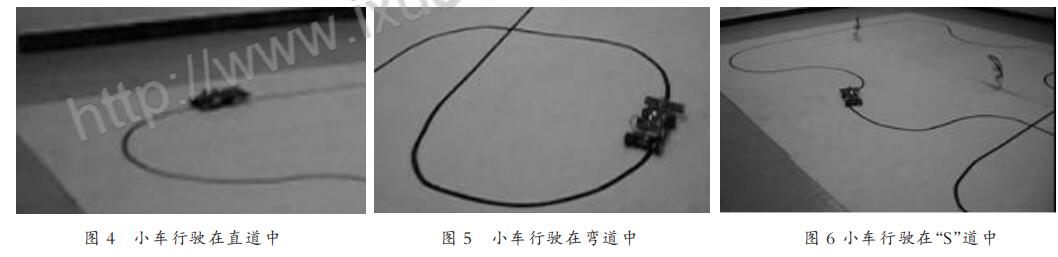
4, test resultsThe experimental results show that the smart car can be put on a specific track and tested. As shown in Fig. 4, Fig. 5, and Fig. 6, the car can travel well and quickly within the specified track. The steering controller based on fuzzy control can realize the steering control of the intelligent vehicle when driving in the straight line, the “S†shape path and the large-turn path, and the steering stability is better.
The system calls the learning module, configures and adjusts the membership function and the weight value, so as to adapt to changes in the external environment. On the other hand, when the work mode is online, the IIDS system mainly detects the illegal user behavior, and first searches the storage system Mysql database. In the three types of behavior record tables, if a user exists in a certain type of table and the number of users is greater than or equal to three times, the response mechanism is directly triggered; otherwise, a fuzzy comprehensive evaluation analysis method is used to detect this illegal behavior, and finally the response mechanism is triggered again. .
Intelligent response modules use active responses instead of passive responses. It actively takes corresponding measures according to different intrusions. It cooperates with the firewall to prevent intrusions and dynamically modify the storage system.
Grid management control platform: It is a centralized control management unit of grid-based intrusion detection system. Through the unified control of the system, the new intrusion detection grid subsystem and other existing subsystems are unified and standardized. The interoperability, interconnection, and interoperability of various subsystems play a major role in the intrusion detection grid system under the unified and coordinated control of the grid management and control platform.
Led Beam Spider Lights ,Spider Beam Light,Led Spider Dj Lights,Beam Spider Lights
Guangzhou Cheng Wen Photoelectric Technology Co., Ltd. , https://www.cwledwall.com