PrimeSense technology is the foundation of Microsoft's Kinect sensor system, which is designed to work with the Microsoft Xbox 360 console gaming system (Figure 1). It works very simply, but the execution process is quite complicated. The PS1080 System-on-Chip (SoC) is a product that perfectly supports PrimeSense technology.

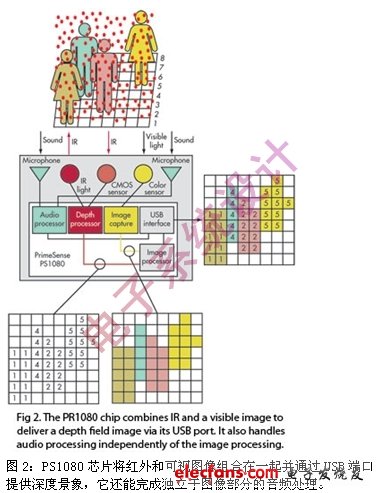
The chip manages audio and video information independently, all of which can be accessed via a USB connection. USB only supplies power to the PrimeSense unit, and Kinect also requires additional power to supply its servo system.
Most design engineers are at least familiar with how Kinect works with Xbox. Kinect is mainly used to provide information about the player to the game program. The player needs to be in front of the TV and face the Kinect, then interact with the game through movement and gestures. It's very interesting to know how Kinect gets this information.
Prior to the introduction of Kinect, gesture recognition like this was achieved using LIDAR (laser induced differential absorption radar) or laser radar. Ultrasonic sensors do not provide sufficient accuracy. Another method is to use image analysis, but it is very complicated and computationally demanding.
PrimeSense uses a completely different approach. It projects an infrared dot pattern from the sensor and then detects it using a conventional CMOS image sensor with an infrared filter. The pattern changes depending on the object that reflects the light. The size and location of those points also vary with the distance of the object from the source.
The PS 1080 receives the results from the image sensor and then produces a depth scene by judging the difference. The resolution of the depth scene is 1024x758 (VGA), but the CMOS sensor has a much higher resolution. The resolution of the image that can be captured by the hardware is actually 1600x1200, which is necessary to provide a depth scene, otherwise there is not enough resolution to detect the position and size of the projected infrared lattice.
The main job of the PS1080 chip is to identify the infrared points and convert their status information into depth values. This is not a simple task, nor is it a general microprocessor can handle it. Fortunately, the PS1080 can do this at a rate of 30 frames per second. Several points are generally found in the area represented by one pixel.
The shortest distance is less than 1 meter (0.8 meters) and the maximum depth is about 3.5 meters. This range is just right for gamers in front of HDTVs. The viewable area is a rectangular cone with horizontal and vertical directions of 58 degrees and 45 degrees, respectively.
The resolution and quality of detection depend on the position of the object relative to the sensor, but the above indicators are adequate for game play and robot object recognition and collision avoidance. At a distance of 2 meters, the depth resolution is 10 mm and the horizontal and vertical resolutions are up to 3 mm.
The video sensor and the deep CMOS sensor are placed in close proximity to facilitate the combination of depth and color images. PS1080 correctly aligns color image (RGB) and depth (D) information by performing a registration process. RGBD information is what needs to be transferred to the host.
For robots that need to avoid an object, only depth information is fine. Sometimes it's enough in the game, depending on what action is being made and how many players are being tracked. The RGBD information can be further analyzed to allow the system to identify objects and their relationships, such as the hand-arm-body relationship.
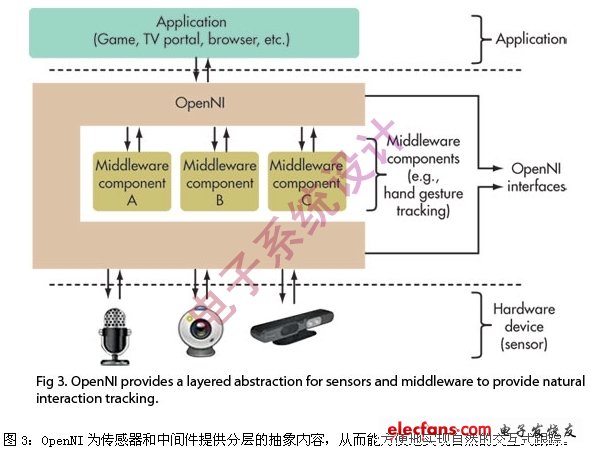
The host completes higher level object and motion recognition. The OpenNI (Natural Interaction) organization provides frameworks and application programming interfaces (APIs) for handling devices like Kinect. OpenNI supports many devices, including video and audio devices (Figure 3), and performs object tracking through higher-end middleware.
Kinect integrates a pair of microphones into the system. The PS1080 can handle 4 external digital audio sources and provide visual video, depth and audio information in a synchronized manner via the USB interface.
Microsoft realized that in addition to working with the Xbox, Kinect should be able to play a greater role. The Kinect interface has long existed, and Microsoft has released a software development kit (SDK) for this interface. The commercial version may already be in use, and PrimeSense also has a corresponding software development kit.
PrimeSense technology is very scalable, so non-gaming and possibly non-robot applications are also interested in it. For example, accurate proximity detection may not require a visual portion of the video. PrimeSense technology will undoubtedly change our way of life.
GALOCE Wireless Dynamometers measure inline force and tension in ropes, cables, guy wires and more. Our rugged dynamometers are the preferred choice of public utilities, nuclear facilities, tower erectors, armed services and material handlers throughout the world. It includes the wireless tension link "TENSLINK" which can be considered as the world's shortest head room, lightest and highest accuracy tension link Crane Scale.wireless Dynamometer load cells available 0.5t to 500t with larger capacities available on unrivalled lead times. Load Cell dynamometers, tension, compression and shackles are in stock. Systems and connected instrumentation and a full range of accessories. dynamometer and solutions for international industry are available for many industrial sectors including on & offshore oil and gas, military, entertainment, marine, aerospace, construction, energy and utilities, environmental, metals and mining, packaging and processing, shipping, salvage and transport.
Tension Load Cells,Wireless Tension Links,Hand Held Dynamometer,Wireless Tension Load Cell,load cell dynamometers
GALOCE (XI'AN) M&C TECHNOLOGY CO., LTD. , https://www.galoce-meas.com